Un exosquelette piloté grâce au cerveau
Publié le - par le blob
Une équipe de l’Université Grenoble Alpes a développé un dispositif permettant de contrôler un exosquelette 4 membres par la pensée grâce à la mesure et au décodage de signaux cérébraux. La nouveauté de ce dispositif est de pouvoir mesurer en haute résolution l’activité électrique dans le cerveau correspondant à des intentions de mouvement puis de les transmettre en temps réel et sans fil vers un ordinateur pour les décoder afin de contrôler les mouvements des 4 membres de l’exosquelette : « marche » et « arrêt » pour les membres inférieurs et des mouvements plus complexes des bras et des poignées.
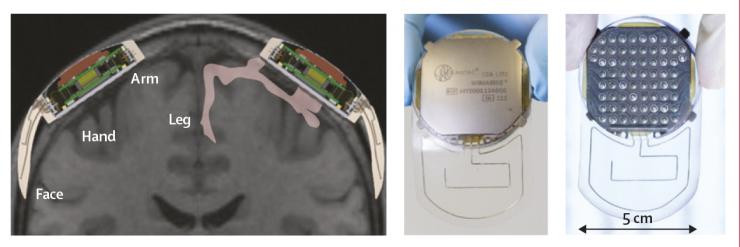
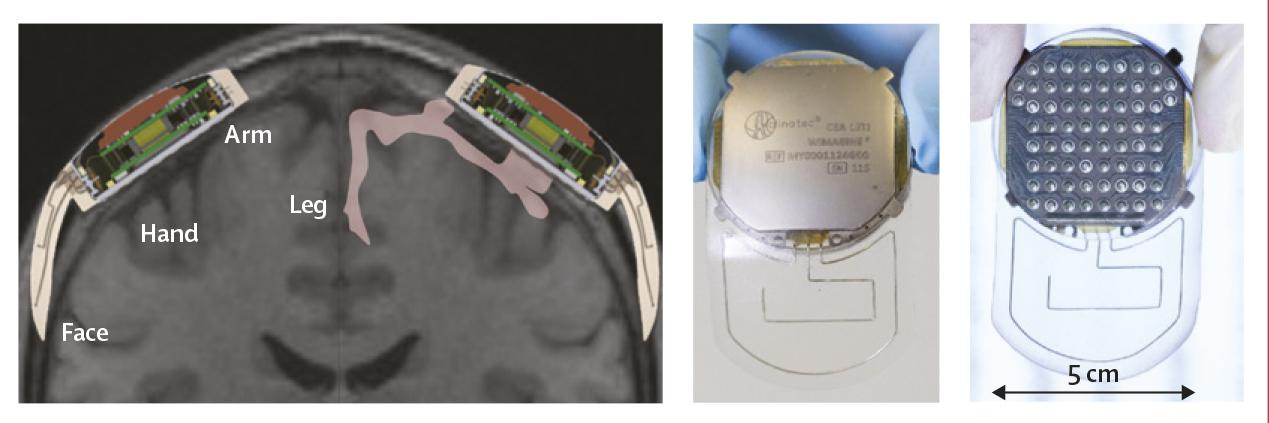
Il s’agit d’« une preuve de concept » – d’une avancée technique – mais le dispositif est encore loin de permettre à un tétraplégique de se mouvoir en toute autonomie. Deux implants équipés de 64 électrodes ont été placés au-dessus de la dure-mère du patient au niveau des zones sensorimotrices supérieures du cerveau. Les signaux électriques du cerveau ainsi captés sont ensuite décodés en temps réel afin de prédire le mouvement imaginé par le patient grâce à des algorithmes sophistiqués, basés sur des méthodes d’intelligence artificielle et des logiciels permettant un contrôle en temps réel des mouvements de l’exosquelette.
La pose des implants a été réalisée en juin 2017. Ensuite, le patient, âgé de 28 ans, s’est entrainé à contrôler l’exosquelette à distance et en situation. Trois jours par semaine, depuis son domicile, il s’est formé au pilotage d’environnements virtuels, comme l’avatar de l’exosquelette et une semaine par mois il s’est rendu à Clinatec, à Grenoble, pour travailler directement avec l’exosquelette. Comme le montre la vidéo, il est aujourd’hui capable d’esquisser quelques pas lorsque que l’exosquelette est suspendu et de contrôler ses deux membres supérieurs dans trois dimensions, tout en ayant la maîtrise de la rotation de ses poignets, en position assise ou debout.
Le développement d’interface cerveau machine, en plein essor aujourd’hui, devrait permettre à l’avenir de compenser différents types de handicap moteur et redonner davantage d’autonomie aux patients dans leur vie quotidienne comme le pilotage d’un fauteuil roulant ou d’un bras articulé. L’équipe du professeur Alim-Louis Benabid à Grenoble envisage d’inclure trois nouveaux patients dans cet essai clinique et de développer des algorithmes plus robustes et précis permettant de réaliser des gestes complexes comme, par exemple, la préhension d’objet.
